Gli encoder per il controllo della posizione di allora e di oggi
Per i dispositivi di misura e i controlli elettronici a funzionamento digitale sono necessari encoder che leggono un angolo di rotazione o una posizione in forma digitale. NUM ha sviluppato un encoder assoluto già nel 1960, quando ancora l’azienda si chiamava con il nome di Güttinger.
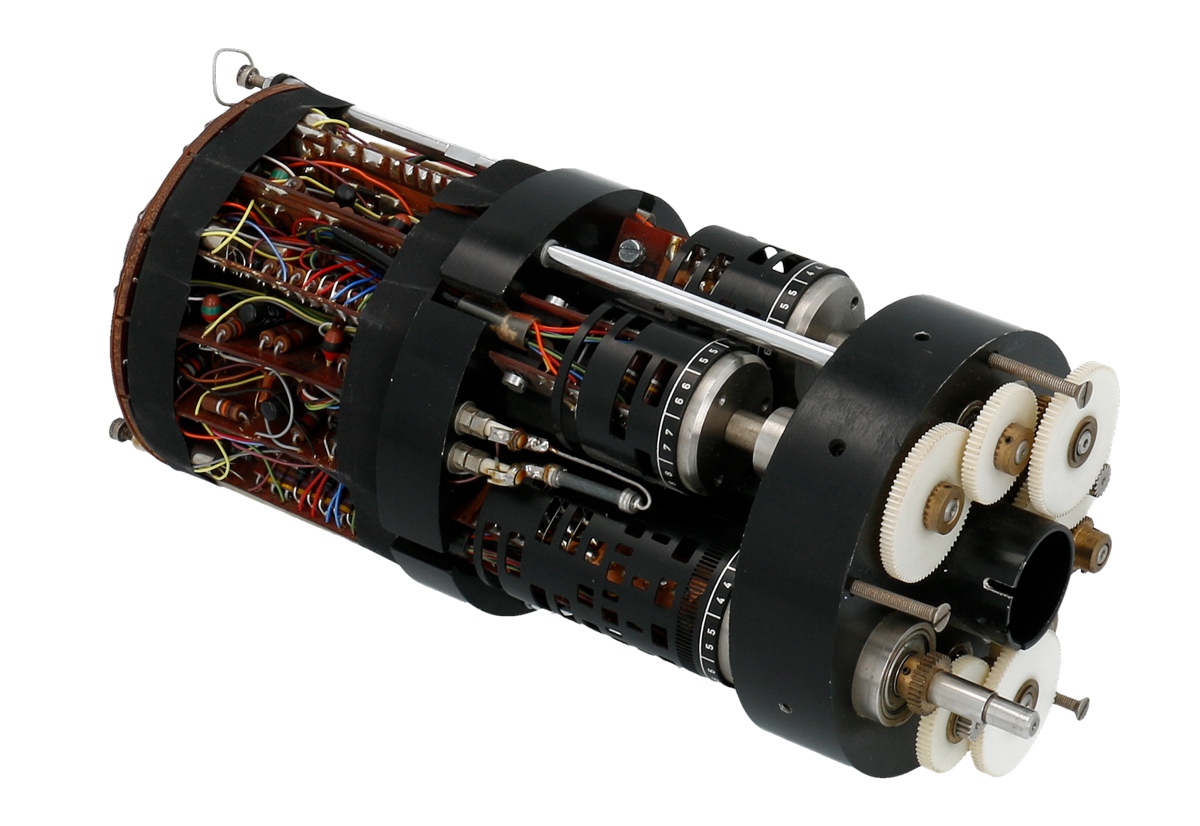
Encoder assoluto nel 1960
L'encoder assoluto misura l'angolo di rotazione di un albero ed emette il valore misurato come numero decimale a sei cifre. Il codificatore aveva cinque tamburi su cui le cifre sono state fresate in un codice speciale Güttinger. In questo codice, solo un bit cambiava da numero a numero. Il primo tamburo aveva i numeri da 00 a 99. Il codificatore aveva quindi una risoluzione di 100 posizioni per giro e la capacità di codificare fino a 10.000 giri. Il tamburo con la risoluzione più alta conteneva anche una traccia del tachimetro.
In seguito, per gli encoder assoluti fu scelto il codice Gray, anch'esso un codice a un passo in cui cambiava solo 1 bit per passo. Fu inventato e brevettato per la trasmissione dei dati nel 1953. Negli anni '60, i giorni pionieristici dell'elettronica, il suo uso pratico nei dispositivi era inimmaginabile a causa dell'elevato sforzo richiesto per la decodifica.
Come è stato risolto questo problema alla NUM (allora Güttinger) senza codice Gray?
Il campo di misura è stato diviso in 6 sezioni di tamburo di una decade ciascuna. Per ogni decade è stato fresato nei tamburi un codice a 4 bit a proprietario di NUM. Il codice è stato selezionato in modo che la fresatura non compromettesse la stabilità dei tamburi ed è stato convertito direttamente nel codificatore in BCD (codice decimale codificato binario) vicino al codice.
Campi di applicazione
Nel 1966 l'encoder NUM ha permesso, ad esempio, all'azienda Knorr di Thayngen, in Germania, di evitare di doversi spostare al punto di riferimento dopo un'interruzione di corrente perché la posizione non andava persa e quindi il lavoro poteva continuare senza problemi e lunghi tempi di fermo macchina.
Gli encoder sono stati utilizzati anche nelle centrali nucleari per i robot ad asta di combustibile e per la centrale elettrica del serbatoio di Grand Dixance. L'encoder è stato utilizzato anche sui Coradomat (tabelle di disegno) negli assi X e Y. Anche il CERN di Meyrin ha utilizzato tale encoder.
Encoder assoluto oggi
Dal 1960 gli encoder hanno subito un ulteriore sviluppo tecnico e dimensionale. Il volume è stato ridotto di un fattore 40 e la risoluzione è aumentata di 168.000 volte.
Oltre ad essere molto piccoli, robusti ed affidabili, i nuovi encoder NUM hanno una risoluzione estremamente elevata per giro (24 bit equivalenti a più di 16 milioni di posizioni per giro), una precisione complessiva di ± 25 arcsec e la capacità di codificare fino a 4096 giri.
Chi ha avuto l'esperienza di cablare encoder di fascia alta sa che non è affatto facile; doppini intrecciati, connessioni di schermatura, operazioni di saldatura complesse, ecc. Tutto questo è storia. I nuovi encoder NUM, integrati nei servomotori SHX e SPX, sono collegati semplicemente utilizzando due fili. Su questi due fili l'alimentazione e i dati digitali vengono trasmessi ad una velocità molto elevata. Il servoazionamento NUMDrive X, al quale sono collegati gli encoder, può leggere ciclicamente la posizione dell'encoder con un tempo di campionamento di 25 µs.
Tutte queste caratteristiche rendono gli encoder NUM ad alta risoluzione unici sul mercato.