Les codeurs de position hier et aujourd'hui
Les appareils de mesure et les commandes électroniques à fonctionnement numérique, nécessitent des dispositifs qui renseignent sur la position angulaire ou linéaire du mobile à contrôler. Dès 1960 NUM, alors sous le nom de Güttinger, avait développé un capteur qui donnait déjà une position absolue.
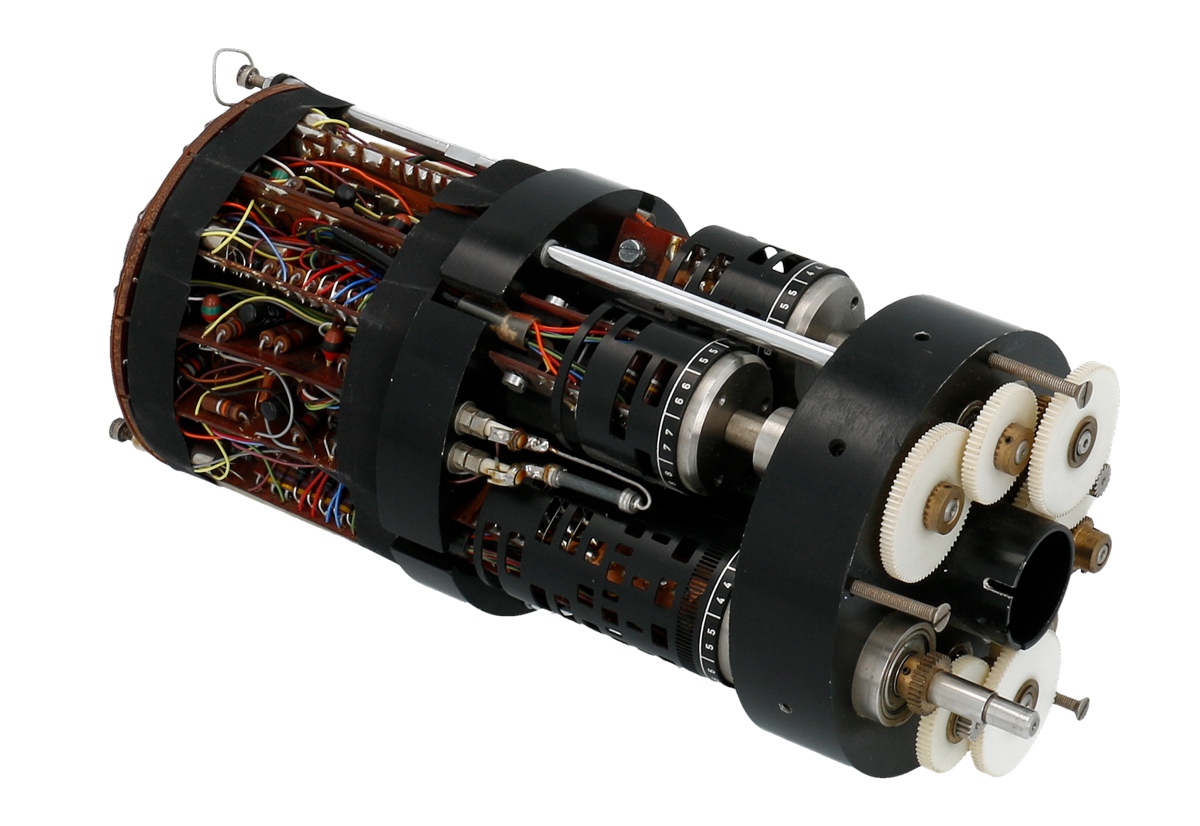
Codeur absolu en 1960
Le codeur absolu mesure l'angle de rotation d'un arbre et fournit la valeur mesurée sous la forme d'un nombre décimal à six chiffres. Ce codeur disposait de cinq tambours sur lesquels les positions étaient marquées par fraisage selon un code propre à Güttinger. Ce code était tel qu’un seul bit changeait d’une position à l’autre pour éviter d’indiquer des valeurs intermédiaires erronées. Le premier tambour comportait les valeurs de 00 à 99. La résolution était donc de 100 positions par tour avec la capacité de coder jusqu'à 10.000 tours. Le tambour ayant la résolution la plus élevée contenait également une piste donnant la vitesse.
Plus tard, le code Gray a été choisi pour les codeurs absolus, il s’agit également d’un code où un seul bit change entre chaque pas. Il avait été inventé et breveté pour la transmission de données en 1953, mais dans les années 1960, époque des pionniers de l'électronique, son utilisation pratique dans les appareils était inimaginable en raison de la complexité de son décodage.
Comment ce problème a-t-il été résolu chez NUM (alors Güttinger) sans code Gray ?
La gamme de mesure a été divisée en 6 sections de tambour d'une décade chacune. Pour chaque décade, un code NUM de 4 bits était fraisé dans les tambours. Le code était choisi de manière à ce que le fraisage ne mette pas en danger la stabilité des tambours et était converti directement dans le codeur en un code proche BCD (code décimal codé en binaire).
Domaines d'application
En 1966, le codeur NUM a permis, par exemple à la société Knorr de Thayngen en Suisse, d'éviter d’avoir à déplacer la machine vers le point de référence après une panne de courant, car la position n'était pas perdue et le travail pouvait donc se poursuivre sans problème et sans longues interruptions.
Les codeurs ont aussi été utilisés dans les centrales nucléaires pour les robots de manipulation des barreaux de combustible ainsi que pour la centrale hydraulique de Grand Dixence dans le Valais. Le codeur a également été utilisé pour les axes X et Y des Coradomats (traceurs). Le CERN à Meyrin a lui aussi utilisé un tel codeur.
Le codeur absolu aujourd'hui
Depuis 1960, les codeurs ont connu de nombreux autres développements internes et externes. Le volume a été réduit d'un facteur 40 et la résolution a été multipliée par 168.000.
En plus de leur taille réduite, de leur fiabilité et leur robustesse, les nouveaux codeurs NUM disposent d’une résolution par tour extrêmement élevée (24 bits, soit plus de 16 millions de positions par tour), une précision globale de ± 25 arcsec et la possibilité de coder jusqu'à 4096 tours.
Quiconque a déjà eu à raccorder des codeurs haut de gamme sait que c’est une tâche extrêmement délicate ; paires torsadées, connexions de blindage, opérations de soudure très précises, etc. Mais tout cela fait maintenant partie de l'histoire. Les nouveaux codeurs NUM, intégrés dans les servomoteurs SHX et SPX, ne se raccordent que par deux fils. Sur ces deux fils, transitent l'alimentation électrique et les données numériques qui sont transmises à une fréquence très élevée. Le variateur NUMDrive X, auquel les codeurs se connectent, peut lire cycliquement la position du codeur avec un temps d'échantillonnage de 25 µs.
Toutes ces caractéristiques font des codeurs haute résolution de NUM des produits uniques sur le marché.